东莞低振动无轴推进器能效提升方案 值得信赖 东莞小豚智能技术供应
- ¥0.000
- 更新 2026-01-29
- 地区 广东省东莞市东莞市广东省东莞市松山湖园区学府路1号13栋1201室
- 联系 耿先生 13532341758
- 东莞小豚智能技术有限公司进入店铺 >>
信息介绍 / Information introduction
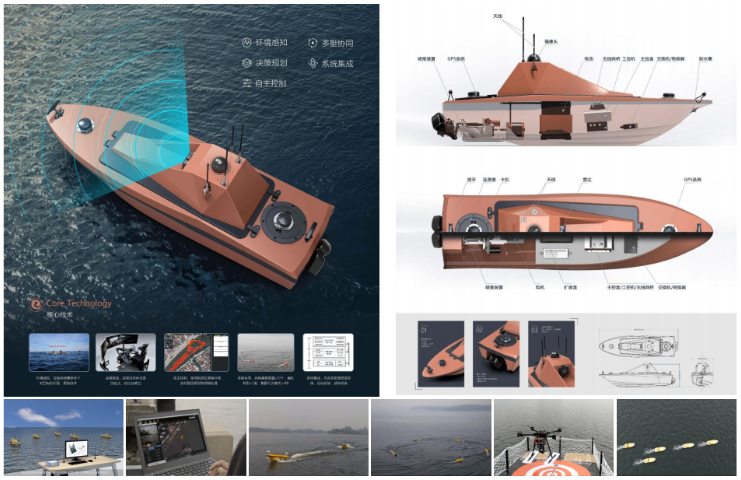
现代无轴推进器正与智能控制系统深度融合,形成更加精细的动力输出解决方案。通过集成高精度传感器和先进控制算法,无轴推进器能够实时感知水流速度、船舶姿态等环境参数,并自动调节输出功率以实现比较好推进效率。在无人船集群作业时,多个无轴推进器可以通过协同控制算法实现编队航行和任务分配,明显提升作业效率。某型海洋测绘无人船搭载的智能无轴推进系统,已实现根据测绘区域自动规划路径并动态调整推进力,将单次作业续航时间延长了20%。随着5G通信和边缘计算技术的发展,无轴推进器的远程监控和自主决策能力还将持续增强,推动水面无人系统向更高智能化水平迈进。 小豚智能的无轴推进器已通过国家装备质量监督检验中心的严格测试认证。东莞低振动无轴推进器能效提升方案

无轴推进器技术的发展正在带动整个产业链的协同创新。从上游的稀土永磁材料、特种密封件,到中游的电机设计与制造,再到下游的系统集成和应用开发,各环节企业正在形成紧密的技术合作网络。东莞小豚智能等创新企业通过建立产学研合作平台,联合高校院所攻克了无轴推进器的多项关键技术难题。目前,国内已初步形成完整的无轴推进器产业生态,相关标准体系也在逐步完善。这种产业链协同创新的模式,不仅加速了无轴推进器技术的迭代升级,也为我国高级海洋装备的自主可控发展提供了重要支撑。未来随着应用场景的不断拓展,无轴推进器产业链将迎来更广阔的发展空间。东莞低振动无轴推进器能效提升方案小豚智能通过无轴推进器技术,提升了无人船在强流环境中的抗干扰能力。

在环保和水域监测领域,无轴推进器为无人船和水下探测设备提供了可靠的动力支持,助力实现高效、低干扰的水体采样与污染监测。传统推进器在浅水或植被密集区域易受缠绕,而无轴推进器的无外露轴设计明显降低了这一风险,使其更适合在复杂水域作业。例如,在湖泊富营养化监测中,搭载无轴推进器的无人船能够长时间巡航,实时采集水质数据,并通过低能耗运行减少对水域生态的影响。此外,无轴推进器的精确控制能力使其可用于定点悬浮观测,配合传感器完成污染物扩散追踪。这种技术为河流、水库及近海区域的环保工作提供了更加灵活和可持续的解决方案,成为现代智能环保装备的重要组成部分。
无轴推进器的推广应用,为水面无人系统的产业化发展提供了重要支撑。通过标准化生产与规模化供应,该产品不仅满足了小豚智能自身江豚、海豚系列无人船的动力需求,还为行业内其他无人船研发企业提供了可靠的动力解决方案,推动水面无人驾驶技术的普及。在与国内外高校、科研院所的合作中,无轴推进器作为关键部件,参与了多项联合研发项目,助力攻克无人船协同作业、远程控制等技术难题。这种开放共享的合作模式,不仅加速了无轴推进器技术的迭代升级,也让其成为连接科研创新与产业应用的重要纽带,为“助力全球水面无人驾驶,让人类生活更美好”的企业愿景注入了切实的技术力量。无轴推进器的低能耗特性使其成为长时间水域监测任务的理想选择。
随着材料科学和电机技术的进步,无轴推进器正朝着更高效率、更强适应性的方向发展。新型复合材料的使用减轻了推进器的重量,同时增强了耐腐蚀性;智能控制算法的引入则进一步优化了推力分配和能耗管理。未来,无轴推进器可能与人工智能深度融合,实现自主避障和协同作业,例如在多无人船编队中发挥主要作用。此外,在深海探测和极地科考等极端环境中,无轴推进器的可靠性和低温性能将得到更多验证。产学研合作也将推动该技术的标准化和产业化,使其在民用、科研及特种领域实现更广泛的应用。无轴推进器的持续创新,将为水面及水下无人系统的发展注入新动力。无轴推进器的冗余设计确保了无人船在关键任务中的动力系统可靠性。东莞低振动无轴推进器能效提升方案
小豚智能的无轴推进器已成功应用于环保监测、水文测绘等多个领域。东莞低振动无轴推进器能效提升方案
无轴推进器的结构设计一直在持续优化,以提高其动力性能和适应性。与传统推进器相比,无轴推进器采用一体化电机与螺旋桨集成方案,减少了机械传动损耗,同时降低了整体重量。现代无轴推进器通常采用强度复合材料外壳,既保证了防水密封性,又增强了抗腐蚀能力,适用于淡水、海水等多种水域环境。在内部设计上,优化磁场分布和绕组方式可以进一步提升电机效率,使推力输出更加平稳。此外,部分先进型号还配备了智能冷却系统,通过液体循环或特殊散热结构,确保电机在长时间高负荷运行时仍能保持稳定性能。无轴推进器的性能提升还体现在控制精度方面。通过集成高响应速度的电子调速系统,操作者可以精细调节转速和推力方向,实现无人船的灵活机动。这种精细控制能力对于需要精确定位的任务(如水下测绘或设备维修)尤为重要。同时,无轴推进器的低振动特性也减少了水声干扰,使其在科研探测中更具优势。未来,随着新型磁性材料和电力电子技术的发展,无轴推进器的功率密度和能效比有望实现进一步突破。 东莞低振动无轴推进器能效提升方案
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。