信息介绍 / Information introduction
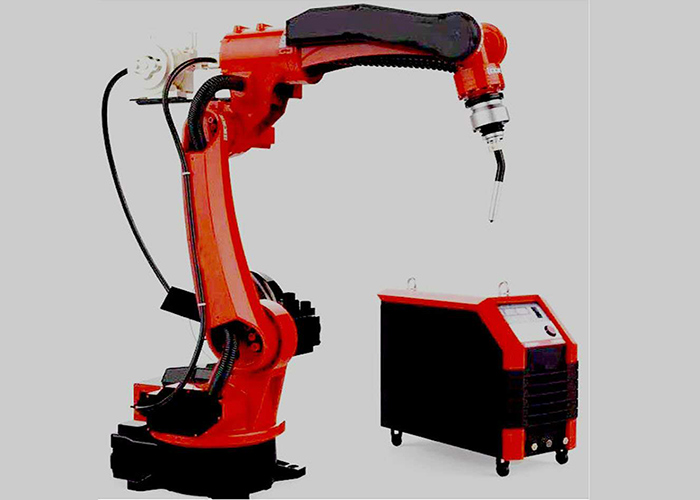
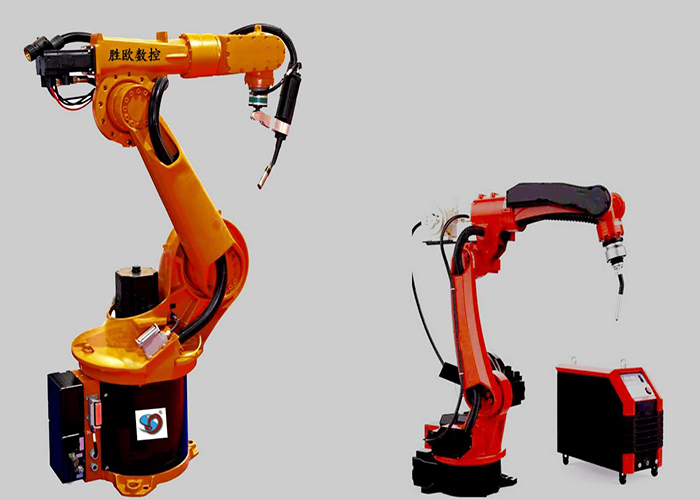
工业机器人减速器的选用。机器人上所用的减速器,常见的有RV减速器和谐波减速器。RV减速器具有长期使用不需再加润滑剂、寿命长、刚度好、减速比大、低振动、高精度、保养便利等优点,适用于在机器人上使用。它的传动效率为0.8,相对于同样减速比的齿轮组,这样的效率是很高的。它的缺点是重量重,外形尺寸较大。谐波减速器的优点是重量较轻,外形尺寸较小,减速比范围大,精度高。机器人设计中,一般1、2、3轴均采用RV减速器,4、5、6轴常用谐波减速器。机器人臂体校核机器人的手臂要进行强度校核和刚度校核,在满足强度和刚度的情况下,手臂要尽可能采用轻型材料,以减少运动惯量,并给平衡机构减少压力。
工业用机器人,搬运曝光装置中使用的掩模(例如,参照专利文献1)。专利文献1所记载的工业用机器人具备装载掩模的手、支承手的基端侧的线性驱动部以及支承线性驱动部的本体部。手具备形成为直线状的两根手叉。两根手叉互相平行配置。掩模装载于两根手叉上。工业用机器人被用于例如制造各种尺寸的掩模的掩模生产线的情况下,该工业用机器人需要将各种尺寸的掩模装载于手上进行搬运。于是,本发明的技术问题在于提供一种工业用机器人的手,是搬运搬运对象物的工业用机器人的手,可以适当地装载各种尺寸的搬运对象物。另外,本发明的技术问题在于提供一种具备这种手的工业用机器人。解决技术问题所采用的技术方案为了解决上述技术问题,本发明的工业用机器人的手是搬运搬运对象物的工业用机器人手,其特征在于,具备:多个手叉,该多个手叉形成为直线状且互相平行配置;支承部件,该支承部件配置于手叉的上表面侧,支承搬运对象物的下表面并且限制搬运对象物在手叉的长度方向上的移动;以及移动机构,该移动机构使支承部件在手叉的长度方向上移动。本发明的工业用机器人的手具备使支承部件在手叉的长度方向上移动的移动机构。

免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。